浦川 禎之 教授
研究室紹介
サーボ制御技術は今まで産業用ロボットや情報機器などの専門領域で用いられてきましたが、これからは介護ロボットやホームロボットなど身近な分野でも広く用いられるようになります。これに合わせ、従来の高速高精度位置決めだけでなく人と共存できる柔軟な制御や、ドローン、セグウェイなどの不安定系の安定化制御も広く用いられるようになると考えています。ロボット制御研究室では、このようなサーボ制御技術をより高度に、そしてより使いやすくすることを目標に研究活動を行っていきます。
主な研究紹介
ディジタル制御器の制御パラメータ決定法
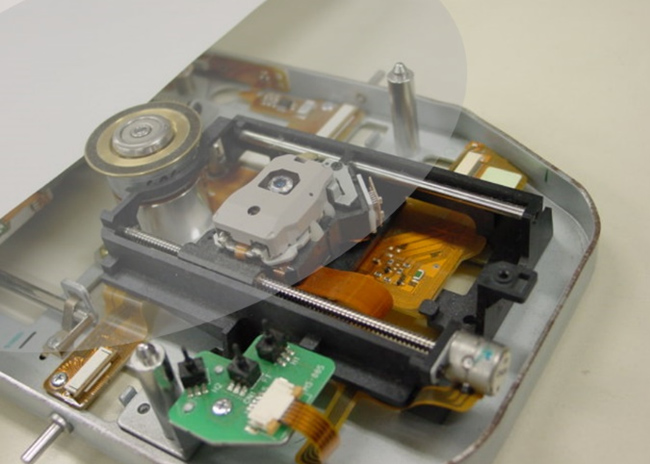
ロボット制御研究室では、広く用いられているPID制御などの固定構成の制御器をディジタル制御で実現した時のパラメータ決定法(限定極配置法)を提案しています。この手法を適用して、光ディスクドライブにおける高ゲインサーボ方式やスマホのカメラモジュールにおける2自由度制御方式適用の提案などを行ってきました。これからも広く応用を図るとともに既存の設計法との関係を探っていきます。
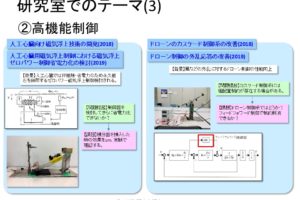
高機能制御の研究
不安定系の安定化や制振制御など、従来の位置決め制御だけではないサーボ技術について深く研究を進めます。具体的には倒立2輪台車の移動制御や、柔軟構造物の制御など、さまざまな制御対象について検討を進めていきます。