櫛橋 康博 准教授
研究室紹介
私たちは、動くボディーを持っているロボットだからこそできることは何かについて考え、林業における作業支援ロボットや情報支援システムの研究、プロジェクションマッピングを利用したロボット技術者育成のための機構学教材の開発などのテーマを中心に、人間の様々な活動を支援するロボット技術の研究を行っています。
主な研究紹介
森林作業支援ロボットの研究
超高齢化社会を迎えつつある日本。林業分野では作業者の高齢化も大きな問題になっています。急峻で複雑な地形をしている日本の林地では海外で実施されているような大型機械による機械化を行うことができません。また、高額なロボットを導入するための経済的な余裕が無い現場がほとんどです。そのような環境下で、高齢者でも安全に作業ができるようなロボットとして、危険な高所作業を支援するための木登りロボットの研究、既存の林業機械にコンピュータやセンサなどの付加装置を取り付けることで、低コストで自動運転が可能なロボットにする研究などを行っています。
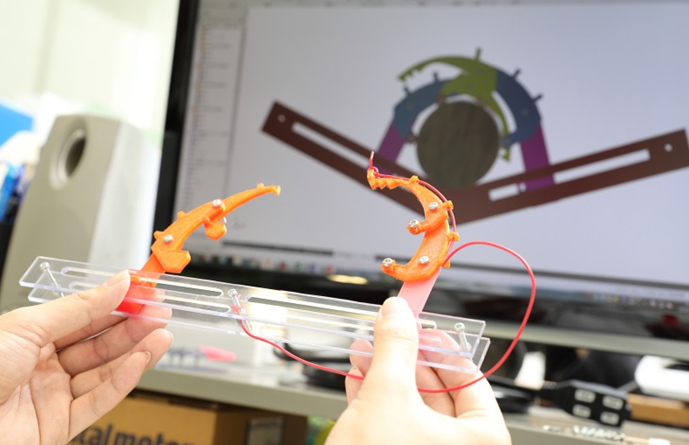
木登りロボットのための把持機構の研究
環境ロボットの研究
林業の分野では、携帯電話の電波が届かない現場も多くあり、情報化が極めて遅れていることも問題になっています。そこで作業支援ロボット、作業者の通信端末、カメラを含む様々なセンサを無線ネットワークで統合し、作業環境全体がロボットして機能する「環境ロボット」の研究を行っています。ネットワークに作業情報を記録するサーバーを設けることで、作業の効率化に必要な情報が得られます。また、作業者が動けなくなったことをセンサデバイスが検出しアラームを発報して周辺の作業者に周知すると同時にアラーム音にデジタルデータを含ませることで作業中の事故による怪我や急病を外部へ自動で送信する救命救急要請システムの研究を行っています。
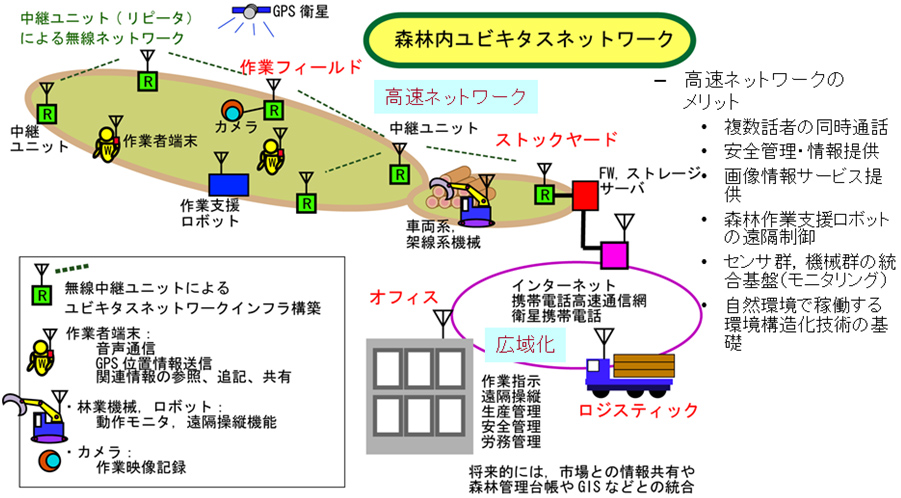
無線ネットワークで環境をロボット化する






