宮川 豊美 教授
研究室紹介
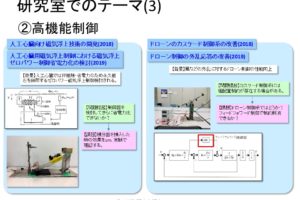
機構設計・高機能要素・システム化をベースにしたメカトロ開発
本研究室では,新しい機構(メカニズム)でロボットを高度化する研究を行っています.メカニズムで巧妙な動きを実現させることができれば構造がシンプルになり,より信頼性の高いロボットシステムが実現できます.そこで,①狭隘部移動ロボット,②人共存環境下で作業するロボットプラットフォーム,③ヒューマンセントリックロボティクス,④ロボットアクチュエータの研究を行っています.研究テーマのベースには,高機能な機能要素を創出する「機構」および「要素」の設計技術とそれらを統合する「システム化技術」が共通な部分となっています.新しいロボット機構とその要素,制御手法の設計・試作など,学生が積極的に研究を行っています.知的好奇心と豊かな発想力で新しいメカトロニクスを考えることを通じてロボティクス,メカトロニクスの基礎と応用を身につけた人材育成に努めています.
主な研究紹介
狭隘部移動ロボティクス
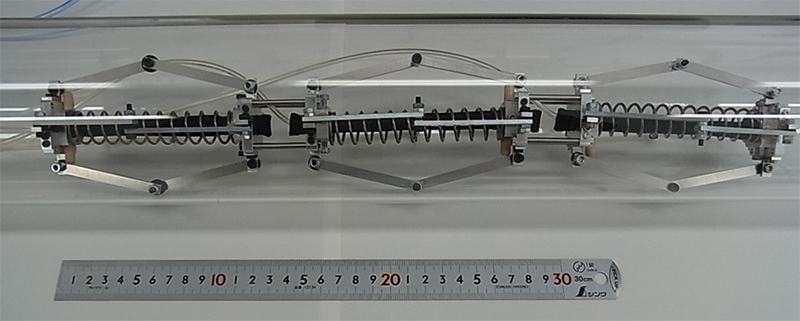
特殊環境下で作業するロボットとして,細径管内を走行可能な推進機構および狭隘部を移動する移動機構の研究を進めています.
アクチュエータテクノロジー
ロボット向けの新機能を有するアクチュエータシステムの基盤技術に関する研究を進めています.
●バックドライバブルで可変剛性機能を有したアシストロボット用アクチュエータの開発
アシストロボット用アクチュエータとして高減速機付きモータが広く採用されているが,装着者の安全性確保には出力に力を検知するセンサを用いており,センサ故障時の安全確保が難しい課題がある.そこで遊星歯車機構の減速機能と差動機能を利用してモータ内蔵のセンサ情報のみで出力のバックドライバビリティと剛性を可変にする機能を有する2モータ1出力のアクチュエータを開発する.歩行アシスト装置,手指の運動支援装置,外出支援アシスト歩行車などの駆動部への応用を目指し,最大トルクが5Nm,0.2Nmの2種の開発した.

試作したアクチュエータ(5 [Nm] )

試作した差動歯車機構(外径24[mm])

試作したアクチュエータ(0.2 [Nm] )
バックドライバビリティを有する3K型不思議差動歯車機構とモータ制御技術を用いて装着型歩行アシスト装置の研究を行っています.
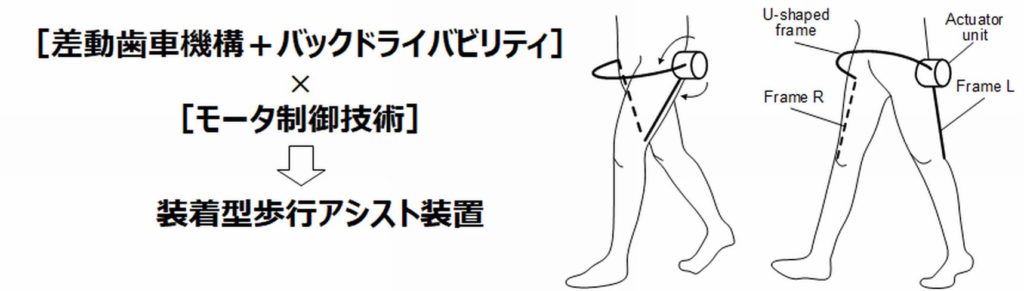
装着型歩行アシスト装置の概念図
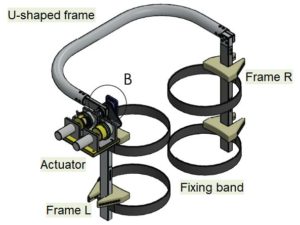
装着型歩行アシスト装置の構造
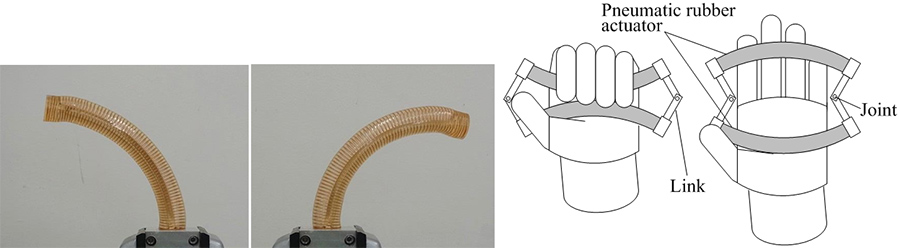
ヒューマンセントリックロボティクス
人との親和性が高いソフトアクチュエータを用いたリハビリテーション支援ロボット,移乗介護支援ロボットなどの研究を進めています.
研究助成
JKA補助事業(採択)